近日,自动化与电子工程学院李少远教授团队步妮副教授与东京农工大学邓明聪教授在软体机器人操作研究领域合作取得新进展,相关研究成果以“Robust Control for Hysteretic Micro-hand Actuator Using Robust Right Coprime Factorization”为题发表于中科院一区、Top期刊《IEEE Transactions on Automatic Control》(IF: 6.8)上,步妮副教授为第一作者&通讯作者,硕士研究生张莹莹与张玉义为主要完成人,必赢优惠y272net为第一通讯单位。
软体机器人,特别是软体机械手,由于其采用软质材料制造,具有更强的操作细小或易碎物体的能力。这种能力使得软体机器人在生物医学、抢险救灾、农业采摘、极端环境探索和精细操作领域具有独特的优势。
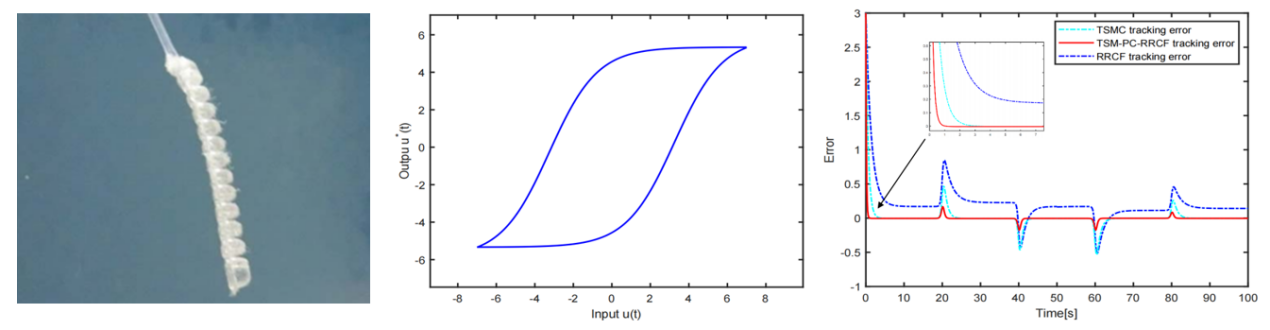
Micro-hand执行器,一种典型的气动驱动软体机械手,通过充入气压的控制,可以形成卷曲,在不损坏物体的情况下进行操作,但操作时却不得不考虑其橡胶材料的固有属性——迟滞特性带来的影响,它会使系统的响应速度变慢,稳定性变差,甚至会影响机械手的操作准确度,同时,Micro-hand执行器亦是典型的非线性系统,其操作难度较大。本文运用鲁棒右互质分解方法分解系统非线性,设计了鲁棒控制器和并行补偿器,保持系统稳定性的同时,减少了迟滞对Micro-hand执行器的影响,进而设计了非奇异终端滑模跟踪控制器,提高了Micro-hand执行器的操作性能。该研究对气动驱动软体机械手的设计和控制提供了理论依据和重要思路,对软体机器人的操作研究具有重要的意义。
上述工作得到了国家自然科学基金和山东省自然科学基金的资助支持。
文章链接https://doi.org/10.1109/TAC.2023.3346988。